
Moduł określany jest nazwą „jednostka przetwarzania ruchu” (3-Axis Gyro + 3-Axis Accel MEMS MotionTracking™ Device). Dzięki 3-osiowemu akcelerometrowi i 3-osiowemu żyroskopowi zapewnia szybkie wytyczenie położenia względem ziemi.
Wybrane cechy modułu:
- Pobór prądu przez żyroskop: 3.6 mA
- Pobór prądu przez akcelerometr: 500 uA
- Pobór prądu przez MPU: 250 uA
- Komunikacja: Magistrala I²C 400 kHz
- Zakres pomiarowy żyroskopu: +/-250, +/-500, +/-1000, +/-2000 stopni/sekundę
- Zakres pomiarowy akcelerometru: +/-2 g, +/-4 g. +/- 8 g, +/-16 g
- Rozdzielczość: 16 bitowa dla każdej osi każdego czujnika
- Szybkość pomiaru żyroskopu: od 4 do 8000 Hz
- Szybkość pomiaru akcelerometru: od 4 do 1000 Hz
- Szybkość pomiaru MPU: od 5 do 200 Hz
- Programowalne wyjście przerwań informujące o poruszeniu urządzenia lub dokonaniu pomiaru
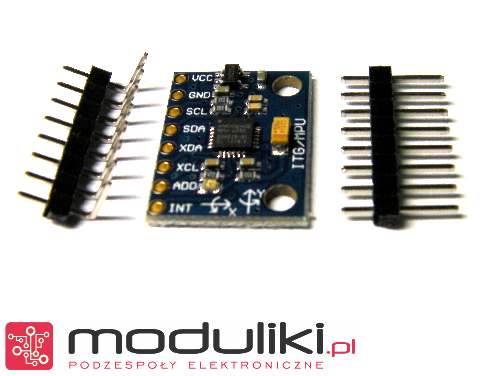
opis wyprowadzeń:
- VDD – Zasilanie V
- GND – Masa zasilania
- INT – Wyjście przerwania (typu otwarty dren)
- SCL – Wejście sygnału zegarowego magistrali i2c
- SDA – Sygnał danych magistrali i2c
- AD0 – Wybiera adres układu na magistrali I²C (podłączony do GND adres 0x68 – podłączony do Vcc, adres 0x69)
- XCL – Wyjście sygnału zegarowego magistrali i2c do magnetometru
- XDA – Sygnał danych magistrali i2c do magnetometru
Wymiary: 15 x 20mm. PCB wyposażono w dwa otwory montażowe Ø3,0mm